マイコン入門編の全体システム構成を示します。本章の内容を元に次章以降から順にシステムを構築していきます。
目標システムの方向性
マイコン入門編では、皆さんにより多くのハードウェア制御方法を学んで頂くことと、リアルなソフトウェア開発の経験を積んで頂きたい思いがあります。そのため、できる限り多くのハードウェアを扱うシステム構成とします。
ビュートローバーはモーター駆動のライントレースロボットです。せっかくライントレースできるロボットなのですから、そこを最終ゴールの目標にしてみましょう。
目標システムのモジュール構成図とブロック図
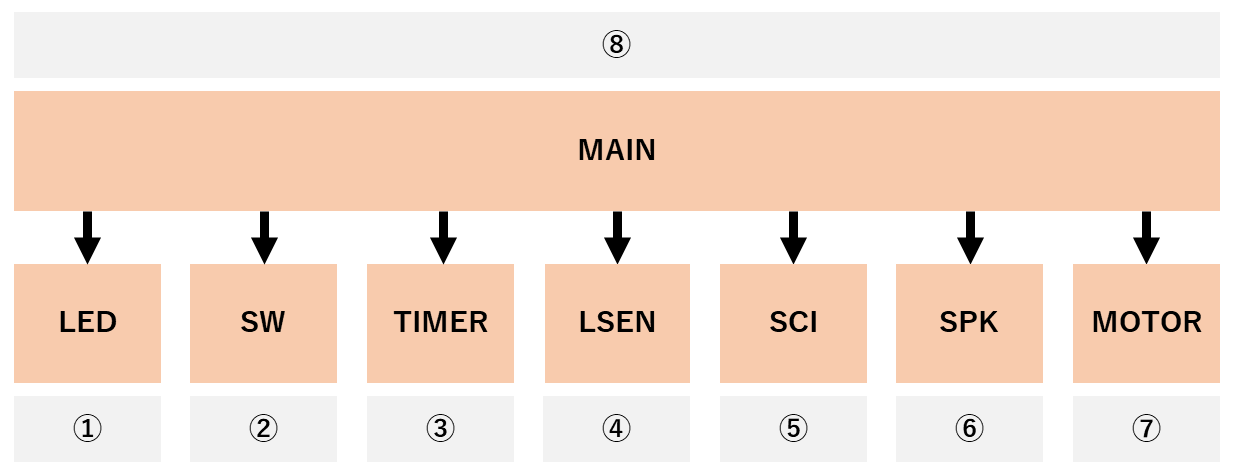
モジュール構成図
モジュール構成図はシステム全体がどのようなモジュールの集まりで構成するかを図示したものです。この図をみることで全体のモジュールの関係性やハードウェアとのつながりを理解できるようにしておきます。
今回作成するシステム全体のモジュール構成は次のものです。
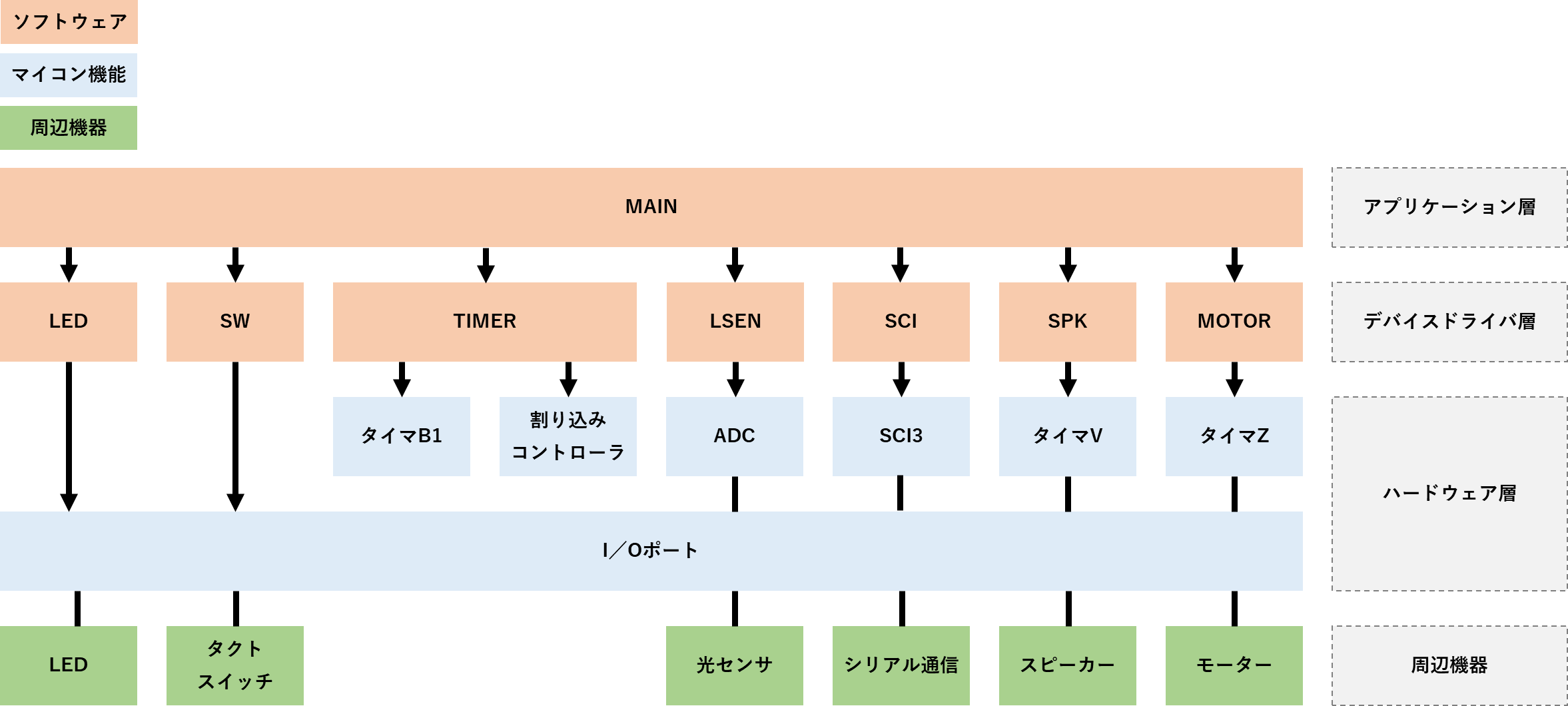
これから先の章ではこれらのソフトウェアモジュールを順番に皆さんに作成していってもらいます。
ブロック図
ブロック図は主にハードウェアの構成を簡略表記した図です。今回はマイコンと周辺機器との接続関係をブロック図として表現します。この接続関係は本来回路図から読み取ることで行います。
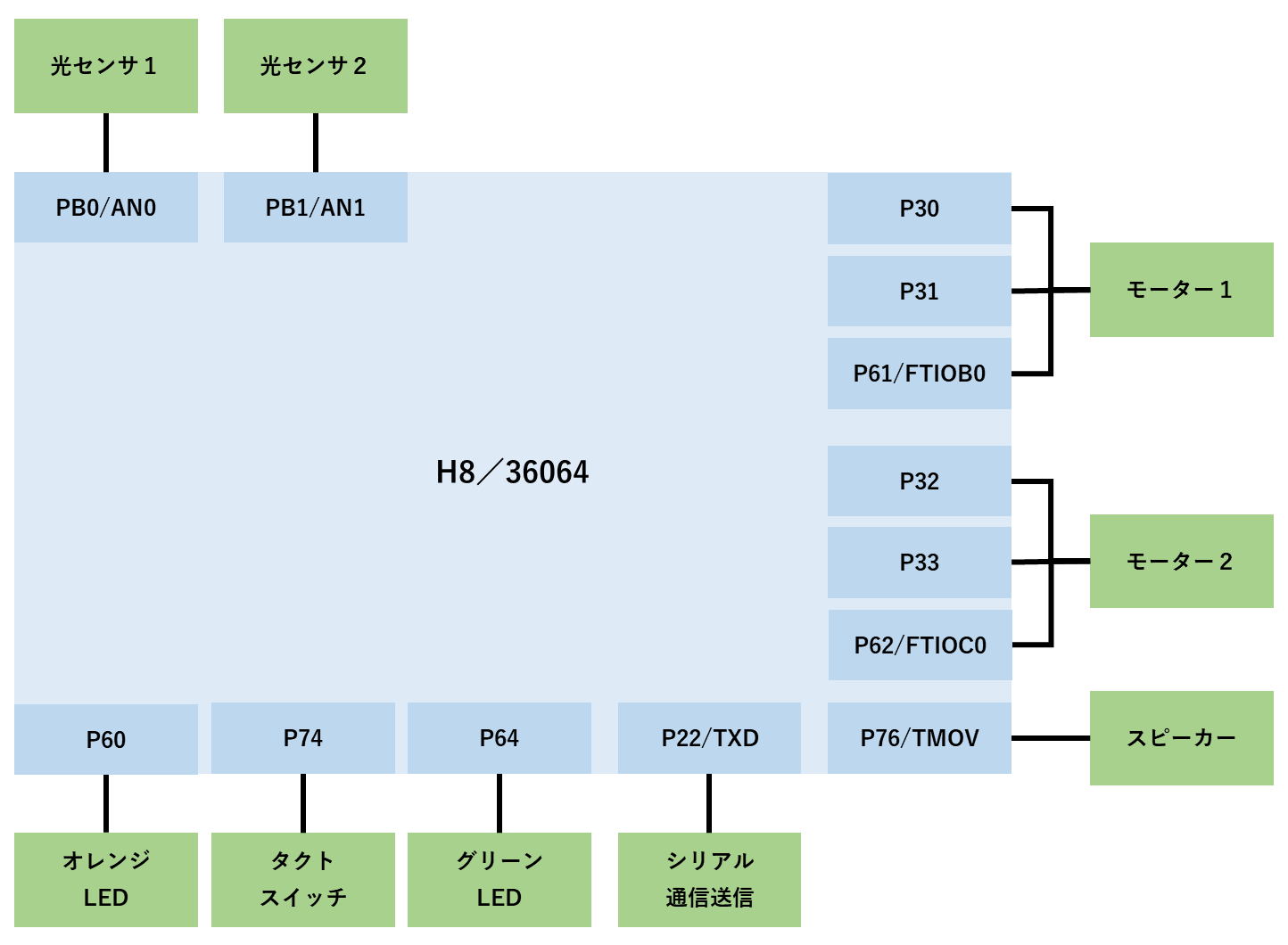
周辺機器との接続状況を確認したいときはこの図を参照するとよいでしょう。
目標システムへ向けたシステム構築順番
階層構造のソフトウェアシステムですが、やはり建築と一緒で下層から順に構築していくのがセオリーです。
今回のシステムでは皆さんが順にスキルアップするために、扱いが簡単なデバイスドライバ層のモジュールから作成していきます。

マイコンカリキュラムまとめ